Способы возбуждений вибраций в сложных механических системах
При наземных испытаниях элементов КА, которые по массе в несколько раз меньше самого аппарата, используются те же методы (динамические и имитационные, испытания на вибропрочность, вибронадежность и др.), однако мощные возбудители с большим ходом штока не требуются. Для этих целей оказывается целесообразным применение вибровозбудителей на базе электродинамических вибраторов ЭДВ как в индивидуальном режиме работы, так и в составе более сложных устройств.
Вибровозбудители строятся по принципу автономных и неавтономных систем. В первом случае работа ЭДВ основана на явлении автоколебаний, когда потребление энергии на преобладание диссипативных сил компенсируется потреблением энергии от неколебательного источника. Такие ЭДВ отличаются высокими энергетическими показателями, но изменение любого из параметров вибраций (амплитуда, частота или фаза) представляет собой серьезную задачу, реализуемую изменением механических параметров. По своей сути это генераторы механических колебаний, в которых вектор выходных воздействий определяется параметрами ЭДВ и присоединенных масс.
Значительно большее распространение получили вибровозбудители неавтономного типа, которые в соответствии с вектором входных воздействий вырабатывают регулируемый вектор выходных величин. Неавтономные возбудители позволяют осуществить три способа возбуждения колебаний [22]: силовой, кинематический, параметрический.
При силовом способе возбуждения регулируемой координатой ЭДВ является развиваемое им усилие. Остальные компоненты вектора (скорость, перемещение и др.) также изменяются, но характер этого изменения не имеет того однозначного соответствия, как между силой и входным сигналом.
При кинематическом воздействии возбуждение колебаний осуществляется сообщением некоторым точкам перемещений, не зависящих от координат состояния системы и их производных.
При параметрическом возбуждении колебания создаются путем изменения параметров ЭДВ во времени.
Кинематические и силовые ЭДВ работают в режиме вынужденных колебаний, что обеспечивает их широкие регулировочные способности. Возможна работа вблизи обычного резонанса (равенство резонансной и вынужденной частот), в режиме супергармонического резонанса (имеется ярко выраженная супергармоника, кратная вынужденной частоте), в супергармоническом режиме (частота колебаний в целое число раз меньше вынужденной частоты), в режиме комбинационного резонанса (отношение частот колебаний и вынужденной частоты — не целое число).
Каждый из способов возбуждения получил распространение на практике, причем силовой возбудитель электродинамического типа — в большей степени. Это обусловлено наличием ряда ценных качеств: широкий диапазон воспроизводимых частот колебаний, отсутствие трущихся частей, простота управления, линейность регулировочных характеристик и др.
Работа электродинамических вибровозбудителей (ЭДВ) основана на явлении возникновения электродинамической силы при взаимодействии постоянного магнитного потока с током в проводнике. ЭДВ имеют множество конструктивных решений, но чаще всего выполняются цилиндрическими и состоят из неподвижной магнитной системы и подвижной обмотки в магнитном зазоре. В качестве вспомогательного оборудования используются системы питания, управления, охлаждения, ориентации оси вибраций и др.
Магнитная система представляет собой (рис. 3.1) магнитопровод 1 с обмоткой подмагничивания 2. Обмотку возбуждения выполняют без охлаждения, либо с воздушным или жидкостным принудительным охлаждением. В маломощных вариантах ЭДВ магнитная система строится на основе кольцевых постоянных магнитов.
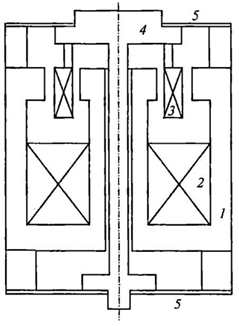
Рис. 3.1. Электродинамический вибровозбудитель
Подвижная система состоит из обмотки 3, штока 4, связывающего ЭДВ с объектом испытаний, и упругих элементов подвески 5. Упругие элементы необходимы для возвращения подвижной системы в положение равновесия, определяемое симметричным расположением подвижной обмотки в рабочем зазоре магнитопровода. Упругие элементы выполняют в виде плоских пружин, мембран, пневматических элементов или специальных компенсационных обмоток, расположенных в магнитном поле (электрическая жесткость).
Обмотка подмагничивания подключена к источнику постоянного тока и создает постоянный магнитный поток в воздушном зазоре магнитопровода. Подвижная обмотка питается от генератора переменного напряжения (тока). В результате взаимодействия тока в подвижной обмотке с постоянным магнитным полем создается электродинамическая сила F, вызывающая перемещение подвижной обмотки и присоединенных к ней частей:

где В — индукции в зазоре; l — длина проводника в магнитном поле (длина части проводника подвижной обмотки, находящейся в зазоре); i — ток в подвижной обмотке; а — угол между направлением тока в проводнике и силовыми линиями магнитного поля.
Направление перемещения определяется знаком тока, а величина этого перемещения — рядом факторов, в числе которых жесткость подвески, масса подвижной системы, величина тока, внешняя сила и др.
Многообразие конструктивных решений ЭДВ определяется требованиями к отдельным показателям, к которым можно отнести: уменьшение магнитных полей рассеяния над воздушным зазором, в который помещена подвижная обмотка; увеличение жесткости подвижной системы в боковых направлениях; снижение индуктивности подвижной обмотки; увеличение индукции в воздушном зазоре; расширение частотного диапазона и ряд конструктивных показателей.
Для всего многообразия конструктивных решений остается справедливым выражение (3.1), которое можно представить как

где J — плотность тока в подвижной обмотке; VB3 — объем воздушного зазора магнитопровода; К3 — коэффициент заполнения объема воздушного зазора обмоткой (отношение объема меди в зазоре к его объему). Величина плотности тока ограничена допустимым нагревом провода с учетом принятой системы охлаждения, индукция в зазоре ограничивается значением индукции насыщения в стали магнитопровода. Рациональное конструирование ЭДВ состоит в создании такой магнитной системы, при которой оптимизируется величина VB3. Значения остальных трех параметров, входящих в (3.2), должны быть либо граничными либо близкими к ним. В качестве дополнительного ограничения на выбор конструктива ЭДВ может рассматриваться минимум массогабаритных показателей, энергопотребления, экономических показателей и др.
Дата добавления: 2022-01-31; просмотров: 907;