Моделирование динамических процессов в КА при знакопеременных продольных нагрузках
Максимальные продольные нагрузки воздействуют на конструкцию КА при старте космического комплекса и разделении ступеней PH.
Случайное сочетание факторов внутренних (масса элементов, координаты центров масс и т.п.) и внешних (величина и спектр импульса разделения, наличие и характер бокового порыва ветра и т.п.) является причиной неповторяемости силовых воздействий на конструкцию КА даже одной серии на одинаковых этапах эксплуатации. На рис. 1.9 приведены графики динамических перегрузок, зарегистрированных на КА «Радуга» при разделении первой и второй ступеней PH «Протон».
Из-за высокой стоимости КА и пуска PH, фактической единичности изготовления и анализа натурных перегрузок следует, что получить достаточно достоверную статистическую информацию для нормирования испытательных и приемосдаточных воздействий конкретного аппарата невозможно.
Из анализа законов изменения входных воздействий на космический комплекс в случае старта и разделения ступеней (см. рис. 1.6, 1.7) следует, что силы тяги PH в этих случаях являются сравнительно монотонными, имеют постоянный знак и аппроксимируются достаточно простыми математическими функциями. Упругая конструкция космического комплекса в результате динамического взаимодействия составных частей трансформирует входной сигнал, и на стык КА с PH или на любой элемент КА приходит результирующее воздействие, определяемое упругими свойствами конструкции комплекса и характером изменения силы тяги.
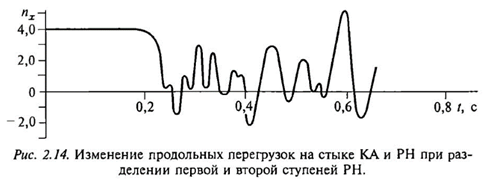
Типовая функция изменения продольных перегрузок на стыке КА и PH для случая старта показана на рис. 2.13, для случая разделения ступеней — на рис. 2.14.

Особенностью моделируемых процессов является одновременность статического и динамического нагружений. Задача не решается традиционными испытательными методами, в частности, для имитации процесса разделения ступеней PH длительностью 1 — 1,5 с необходимо создание линейного ускорения постоянного знака на рабочем ходе испытательного средства (стенда) 15—20 м.
При выборе метода имитации переходных процессов при НЭО использованы два варианта: последовательное воспроизведение статической и динамической составляющих процесса и одновременное воздействие. Оба варианта базируются на предположении о корректности замены постоянного линейного ускорения низкочастотными гармоническими колебаниями с соответствующей линейному ускорению амплитудой. Критерием эквивалентности замены является отстроенность частоты гармонических колебаний от диапазона собственных частот конструкции КА и его элементов. Проведенный анализ добротности конструкций для рассматриваемого класса связных и навигационных КА подтвердил достаточность выполнения условия, приведенного в:
Где  - частота низкочастотных гармонических колебаний;
- частота низкочастотных гармонических колебаний;  - первая собственная частота колебаний конструкции КА.
- первая собственная частота колебаний конструкции КА.
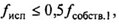
При последовательном воспроизведении статической и динамической составляющих переходного процесса (см. рис. 2.14) воздействие на конструкцию КА имитировалось предложенной последовательностью двух испытательных сигналов, графики перегрузок которых показаны на рис. 2.15. Сигнал а представляет собой низкочастотные гармонические колебания, модулированные по закону изменения силы тяги натурного процесса разделения ступеней или по результатам расчета. Число колебаний на каждом уровне определяется в зависимости от времени натурного воздействия на конструкцию с данным уровнем перегрузки. Сигнал б — динамическая знакопеременная составляющая натурного процесса (см. рис. 2.14), центрированная относительно функции изменения силы тяги.
При использовании выделенной таким образом динамической составляющей натурного процесса при испытаниях на виброкомплексе была выявлена нестабильность положения поршня гидроцилиндра относительно его среднего положения. Исследования показали недостаточность центрирования испытательного сигнала по перегрузке относительно функции изменения силы тяги.
Для обеспечения стабильности среднего положения поршня было предложено проведение дополнительного центрирования динамической составляющей сигнала (см. рис. 2.15, б) по перемещению одним из способов:
- смещением среднего положения всего процесса;
- введением в сигнал дополнительных динамических процессов, не искажающих характер упругих взаимодействий (например, низкочастотной гармоники). Проведенные исследования показали их равноценность, поэтому в дальнейшем использовался способ смещения средней оси всего процесса как более простой в реализации.
Были предложены два пути формирования управляющего сигнала при воспроизведении динамической составляющей натурного процесса. Первый путь (теоретический) — предварительное определение кинематического параметра внешнего воздействия с учетом различий динамических моделей взаимодействий КА с PH и испытательным стендом. Второй (экспериментальный) — последовательное приближение отклика с контрольной точки изделия к заданному (рассчитанному или зарегистрированному при натурной эксплуадации прототипа). При этом сигнал, полученный из контрольной точки КА, переводится из временной области в частотную, проводится сравнение спектров заданного сигнала и отклика с последующей корректировкой управляющего сигнала и выдачей его в контур управления. Процесс повторяется до формирования сигнала отклика с КА, в достаточной степени соответствующего заданному.
Как показали проведенные исследования, оптимальным является комбинированный расчетно-экспериментальный метод формирования испытательного воздействия, при котором производится предварительное определение параметра внешнего воздействия из анализа динамических характеристик системы “стенд — КА”. Полученный управляющий сигнал рассматривается в качестве исходного при экспериментальной итерационной его корректировке в процессе сравнения сигналов с контрольной точки КА и программного.
Сравнение расчетных и натурных динамических характеристик КА выполнено для старта КА «Радуга» (см. рис. 2.13), откуда видно, что принятая динамическая модель в достаточной мере отражает свойства реального космического комплекса. Соответствие экспериментальной и расчетной перегрузок по фазе подтверждает, что в модели учтены все значимые параметры конструкции.
Различия между амплитудами расчетных и экспериментальных колебаний не более 20 %, они объясняются в основном различной податливостью опор стартового стола, неравномерностью ветровых потоков, разновременностью выхода на режим двигателей первой ступени PH.
Выбор парциальной частоты КА определяется разработчиком PH и РБ для ограничения продольных перегрузок на элементах РБ (обычно на баке горючего Г), возникающих вследствие динамического взаимодействия КА и РБ при переходных процессах. Варьирование парциальной частоты КА осуществляется изменением жесткости опорной конструкции КА.
Проведенные исследования показывают, что при назначении испытательных режимов, соответствующих натурному взаимодействию КА и PH, необходимо учитывать случай нагружения, типы носителя и РБ, класс КА.
Для оценки уровня перегрузок у мест крепления отдельных узлов или приборов КА в модель космического комплекса должна быть введена более подробная динамическая модель КА, что значительно усложняет расчет. Поэтому предложен более перспективный и экономичный путь определения перегрузки на элементах КА, при котором функции изменения перегрузок в плоскости стыковки РБ и КА или в центре массы КА являются входным воздействием.
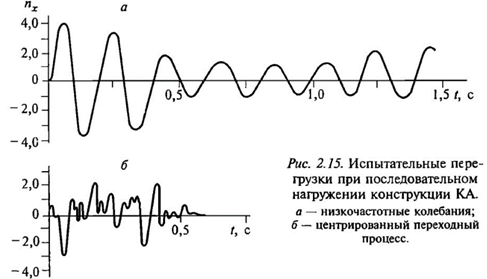
Одновременное воздействие статических и динамических нагрузок на КА, возникающих при натурных переходных процессах, предлагается выполнить формированием сигнала, в котором фрагменты мгновенных значений динамического процесса наложены на мгновенные значения низкочастотных колебаний на уровнях, имитирующих статическую составляющую. Испытательный сигнал, имитирующий одновременное воздействие статических и динамических нагрузок в случае разделения ступеней PH, показан на рис. 2.16.
Рис. 2.16. Испытательные перегрузки на КА при комплексной имитации случая разделения ступеней PH.
Составные фазы сигнала:
I - выход на режим низкочастотного гармонического воздействия;
II - испытательный сигнал;
III - фаза поддержания амплитуды низкочастотного сигнала и центрирования исполнительного органа испытательного стенда в среднем положении;
IV - фаза снятия испытательной нагрузки.
Фазы I и IV необходимы для выхода на испытательный режим и окончания испытаний без возбуждения собственных частот колебаний элементов конструкции КА.
Фаза II — последовательное наложение отдельных частей центрированного переходного процесса на соответствующую испытательному уровню часть периода низкочастотных колебаний.
Отличие исходных фрагментов переходных процессов от “наложенных” в фазе II сигнала на низкочастотные колебания объясняется необходимостью гладкого перехода в фазу III, в которой поддерживается режим низкочастотных колебаний и обеспечивается центрирование рабочего органа испытательного средства по перемещению. Амплитуды гармонических низкочастотных колебаний моделируются по закону изменения по времени натурной (расчетной) силы тяги.
Важное значение для формирования комбинированного сигнала имеет шаг дискретизации динамической знакопеременной составляющей процесса. Для его определения необходимо выработать критерий соответствия нагрузок при низкочастотных колебаниях и реальном статическом (в общем случае — знакопостоянном) нагружении. Единого количественного критерия соответствия или несоответствия уровней натурного и испытательного сигналов при экспериментальной отработке КА не существует, так как коэффициенты запаса, в которые в числе прочих входят и погрешности имитации нагрузок, меняются в зависимости от типов КА (пилотируемые или автоматические), условий эксплуатации КА (одноразовые или многоразовые), случаев нагружения (наземные или полетные) и т.п. В то же время, независимо от перечисленных вариантов, имеются достаточно определенные пределы погрешностей, установленные для типов испытательных воздействий: статических, вибрационных, ударных и т.п.
Установленные нормативно-технической документацией пределы погрешностей при испытаниях для различных типов испытательных воздействий таковы (%):
- при статических испытаниях - 5,
- при динамических (вибрационных) - от 10 до 20,
- при ударных – 40.
В зависимости от допускаемых значений погрешности для наложения динамической составляющей процесса может быть использована часть полуволны гармоники длительностью т с амплитудой, равной 0,6—0,95 от максимальной А0.
Длительность испытательной фазы низкочастотного гармонического сигнала приведена на рис. 2.17.

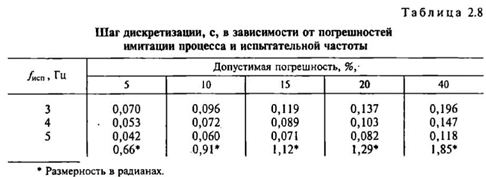
Шаг дискретизации динамической экспериментальной составляющей процесса зависит от величины допустимых погрешностей по амплитуде перегрузки и от частоты первого тона конструкции КА, поперечные составляющие которых для связных и навигационных КА не опускаются ниже 8—10 Гц. Реализация испытательной частоты низкочастотных синусоидальных колебаний ниже 3 Гц требует специальных разработок в области испытательных средств, оснащенных системами автоматического управления. Таким образом, с учетом (2.12) диапазон испытательных частот гармонических колебаний, имитирующих силу тяги PH, составляет 3—5 Гц.
Значения шагов дискретизации знакопеременного динамического процесса с учетом указанных ограничений приведены в табл. 2.8.
Анализ перегрузок, действующих на КА при старте и разделении ступеней PH, показывает их ярко выраженный динамический характер вследствие резкого спада и нарастания тяги двигателей PH. Нестационарность натурных процессов и соответствующих им испытательных сигналов в виде переходных функций, предопределяющих возникновение широкого частотного спектра, позволяет с достаточной степенью уверенности принять для имитации переходных процессов пределы погрешности, допускаемые для ударных процессов — 40 %. В технически обоснованных случаях (например, при имитации менее динамичных процессов) указанный критерий может быть изменен в сторону уменьшения допустимой величины отклонения испытательного сигнала от натурного.
Проведенная оценка динамических характеристик КА исследуемого класса показала, что для реализации переходного процесса случая разделения длительностью до 1,5 с необходимо, в зависимости от первого собственного тона КА, 8-35 периодов низкочастотных колебаний с наложенными фрагментами динамической составляющей процесса.
Формирование испытательного сигнала, одновременно создающего статическую и динамическую составляющие натурного процесса, выполнимо только для точки контроля режима. В остальных точках конструкции, в частности, в местах крепления отдельных узлов и систем, при прерывании каждого фрагмента динамической составляющей процесса, наложенной на испытательную фазу низкочастотного гармонического сигнала, будут продолжаться собственные затухающие колебания узлов и систем. Это объясняется тем, что собственные низшие тона колебаний конструкции связных и навигационных КА и их систем находятся в диапазоне динамического взаимодействия КА и PH.
В случае испытания отдельных систем КА, смонтированных на силовой конструкции, точка контроля режима переносится в место крепления данной системы к конструкции КА. Метод испытаний при этом остается неизменным, но входное воздействие на вибросистему рассчитывается из условия создания программного воздействия в месте крепления испытываемой системы.
Дата добавления: 2022-01-31; просмотров: 831;