Механизмы управления тракторами и автомобилями
Способы совершения поворотов.Поворот ТС можно осуществить несколькими способами (рис. 23.1). Чтобы колеса при повороте двигались без скольжения и бокового заноса, все колеса ТС должны перемещаться по окружностям с единым центром поворота О.
Для этого внутренние колеса должны быть повернуты на больший угол, чем внешние.
С этой целью колесные транспортные средства оборудованы рулевой трапецией.
Расстояние от центра поворота до центра внешнего колеса при наибольшем угле поворота управляемых колес называют минимальным радиусом поворота.
Однако даже после поворота колес ТС продолжает некоторое прямолинейное перемещение.
При повороте со стороны опорной поверхности на управляемые колеса действует сила боковой реакции Р, которая заставляет остов ТС поворачиваться.
В случае недостаточности силы боковой реакции Р (недостаточное сцепление колес с дорожным полотном, небольшой радиус колеса и др.) машину заносит (боковые увод и скольжение).
Способность ТС противостоять скольжению или опрокидыванию называют устойчивостью.
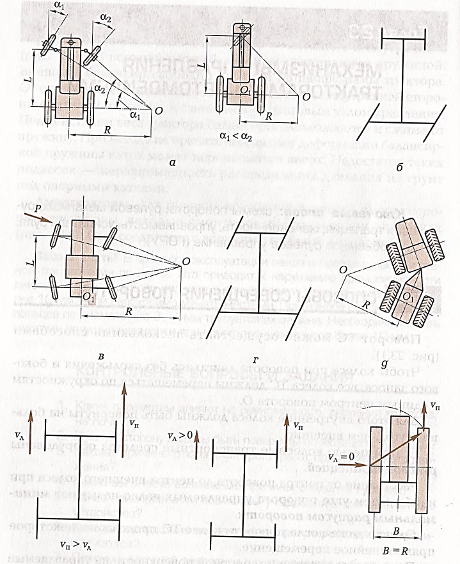
Рис. 23.1. Способы совершения поворотов ТС: а — поворотом передних колес; б — поворотом задних колес; в — поворотом всех колес; г — «крабом»; д — смещением полурам; е — изменением скоростей движения правого и левого движителей; ж — отключением одного из движителей; з — торможением одного движителя; уп — скорость правого движителя; уд — скорость левого движителя; В — ширина ТС; R — радиус поворота; О — центр поворота; L — продольная база; оц — угол поворота внешних колес; а2 — угол поворота внутренних колес; Р — боковая реакция со стороны дороги на колесо; О, — центр ТС
Требование к рулевому управлению.Поворот колес трактора (автомобиля) осуществляют с помощью рулевого управления. Его работа оказывает существенное влияние на безопасные условия эксплуатации ТС. Рулевое управление должно обеспечивать: легкость управления, следящее действие, маневренность, заданное направление движения, качение управляемых колес с минимальным заносом на поворотах, отсутствие автоколебаний и стабилизацию управляемых колес.
Легкость управления подразумевает легкость поворота руля. При усилии поворота руля менее ЗОН у водителя теряется «чувство руля», а при значениях более 50 Н — наступает быстрая утомляемость.
Следящее действие — способность рулевого управления поворачивать колеса пропорционально углу поворота руля с усилием, зависящим от сопротивления колес повороту. Оно должно предотвращать передачу ударов на руль при движении по неровной поверхности.
Маневренность — способность управляемых колес быстро реагировать на повороты руля и выполнять разворот на минимальной площади.
Автоколебания — колебания колес (10...30 Гц) при неподвижном рулевом колесе. Могут возникнуть в определенном диапазоне скоростей, когда колеса связаны мостом (зависимая подвеска).
Стабилизация управляемых колес — способность возвращения колес после поворота в прямолинейное положение при отпущенном рулевом колесе.
Устройство рулевого управления.Рулевое управление (рис. 23.2) состоит из рулевого механизма и рулевого привода.
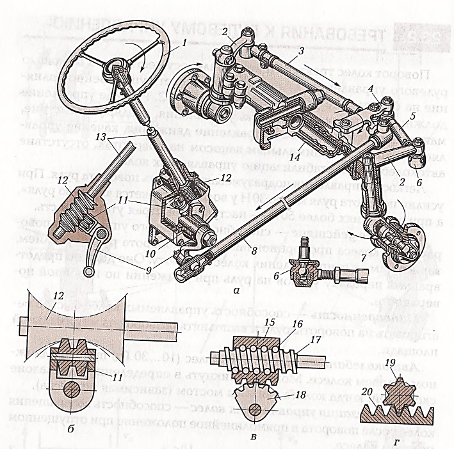
Рис. 23.2. Устройство рулевого управления: а — общий вид механического привода; б — червячно-роликовый рулевой механизм; в — винтореечный механизм; г — реечный механизм; 1 — рулевое колесо; 2 — рычаги поворотных цапф; 3 — поперечная рулевая тяга; 4 — маятниковый рычаг; 5 — боковая рулевая тяга; 6 — шарнир; 7 — цапфа; 8 — продольная рулевая тяга; 9 — сошка; 10 — вал сошки; 11 — ролик; 12 — червяк; 13 — рулевой вал; 14 — передняя ось; 15 —- гайка; 16 — шарики; 17 — винт; 18 — сектор; 19 — шестерня; 20 — рейка
Рулевой механизм предназначен для передачи и увеличения вращательного момента от рулевого колеса к рулевому приводу.
На автомобилях применяют механическое рулевое управление, а на тракторах — механическое, гидромеханическое и гидрообъемное (гидростатическое) управление.
Рулевой привод предназначен для передачи усилия от рулевого механизма к управляемым колесам. Он может быть механическим или гидромеханическим. В механическом рулевом управлении рулевой механизм преобразует вращение рулевого колеса в поворот рулевой сошки. Рулевая сошка воздействует на продольную тягу через маятниковый рычаг, который перемещает поперечную и боковую рулевые тяги. От них перемещение передается на рычаги поворотных цапф, которые поворачивают колеса. Передаточное число рулевого механизма должно быть переменным (16... 25), чтобы усилие на руле увеличивалось пропорционально его повороту. Для этой цели используют червячные и реечные передачи.
Основной частью рулевого привода является рулевая трапеция. Она состоит из поворотных рычагов, поперечных рулевых тяг и оси управляемых колес.
В зависимой подвеске (с передней балкой) трапеция неразрезная; в независимой подвеске — трапеция разрезная.
Важно знать! В тракторах продольная тяга может быть расположена вдоль лонжерона. Это ограничивает возможность бокового навешивания машин и орудий.
При наезде передних колес на неровность балка приподнимается и перемещает передний шарнир рулевой тяги. Это может привести к самопроизвольному повороту колес. В целях устранения этого недостатка рулевой механизм может быть расположен над балкой моста, а рулевая сошка соединена с поперечной рулевой тягой без продольной тяги.
При изменении колеи управляемых колес необходимо менять длину поперечных тяг. Это приводит к изменению кинематики поворота колес. Чтобы не проводить повторные регулирования, параметры трапеции оставляют для наиболее часто используемой колеи.
Дата добавления: 2022-01-31; просмотров: 1015;