Скорость хода и дальность плавания подлодок
Одна из важнейших тактических характеристик, определяющей в последнее время ходовые качества ПЛ всех типов, — скорость полного подводного хода. Развитие подводного кораблестроения сопровождалось непрерывной борьбой за увеличение этой скорости и дальности плавания. Тактическое значение прочих ходовых режимов — надводный ход, ход на перископной глубине, ход экономической скоростью — для атомных и неатомных ПЛ носит неоднозначный характер.
Скорости полного подводного хода современных АПЛ различных подклассов находятся в пределах от 22...25 до 30...45 узлов. Нижняя область указанного диапазона относится к стратегическим АПЛ с баллистическими ракетами, предназначенными для действий против береговых объектов. Верхняя область относится к многоцелевым АЛЛ. Подводные лодки с крылатыми ракетами имеют достаточно высокие скорости — 30...40 узлов — для осуществления слежения за ударными авианосными соединениями, перемещающимися с большой скоростью.
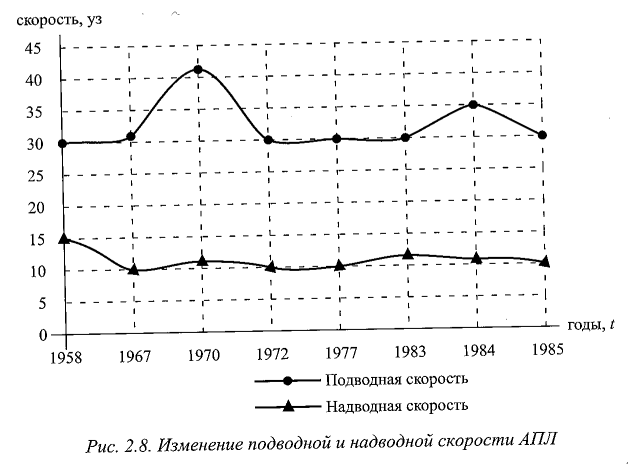
Скорость надводного хода современных подводных лодок ограничена формой их корпуса, которая является оптимальной для под-водного плавания, и ухудшением условий работы гребных винтов вблизи свободной поверхности, и не превышает 15..16 узлов (рис. 2.8) [42].
Дальность плавания АПЛ по энергоресурсам, содержащимся в активной зоне, практически не ограничена и определяется автономностью и моторесурсом основного оборудования.
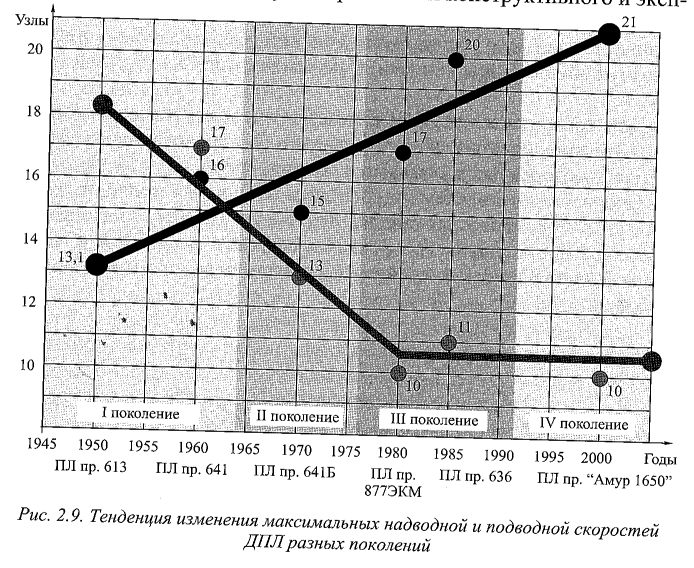
Скорость полного подводного хода дизельных подводных лодок 1-2 поколений составляла 14...16 узлов. Как правило, эти подводные лодки, двух- или трехвальные, имели штевневые обводы носовой оконечности и крейсерскую кормовую оконечность. На подводных лодках 3-го поколения («Варшавянка»), имеющих форму корпуса в виде тела вращения, достигнута скорость 20 узлов. На рис. 2.9 показана тенденция изменения максимальных надводных и подводных скоростей для дизельных подводных лодок разных поколений [63].
Дальность подводного плавания ДПЛ монотонно возрастает с уменьшением скорости хода, нижний предел которой ограничивается тактическими соображениями и условиями управляемости на малых скоростях и составляет около 3 уз.
Для дизельных ПЛ большое значение имеет ход в режиме РДП. Максимальная скорость в этом режиме не превышает 8..12 узлов. Ее увеличению препятствуют ограничения конструктивного и эксплуатационного характера (количество воздуха, поступающего в дизельный отсек, недопустимая вибрация выдвижных устройств и т.д.). Дальность плавания в режиме РДП задается обычно для экономической скорости хода (7...8 уз) и достигает 10000 миль и более.
Исследование спектра скоростей показывает, что на долю полного подводного хода приходится не более 5% от всего времени похода. Это объясняется интенсивным шумообразованием, возникающим на максимальных скоростях хода и демаскирующим подводную лодку, а также высоким уровнем помех собственному ГАК. На этом обстоятельстве основано мнение о второстепенном значении полной подводной скорости как тактического элемента ПЛ и нецелесообразности ее высоких значений. С другой стороны, в пользу высокой скорости говорит то обстоятельство, что при ее увеличении повышается вероятность частоты встречи с целью, а также уклонения ПЛ от преследующих кораблей противника и выпущенного ими оружия, следовательно, уменьшается вероятность ее гибели.
Таким образом, высокая скорость хода может оказаться полезной в критических ситуациях, тем более, что проводимые непрерывно во всем мире работы по снижению уровня акустического поля и повышению помехозащищенности ГАК дают основания для дальнейшего роста скорости хода.
Выразим сопротивление воды движению обычной формулой:

Запишем выражение для определения мощности энергетической установки в виде

Подставляя в нее выражение сопротивления из формулы (2.9) и решая относительно скорости, получим зависимость:

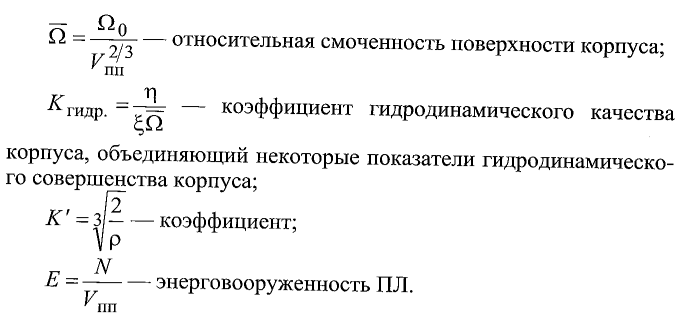
Как следует из формулы (2. 11), проблема увеличения скорости хода может быть решена двумя путями: увеличением энерговооруженности (Е) и повышением коэффициента гидродинамического качества (Кгидр.).
Увеличение энерговооруженности — обычный путь, сводящийся к увеличению мощности ЭУ. При этом неизбежен рост водоизмещения, что значительно уменьшает эффект увеличения мощности.
Второй путь — гидродинамическое и геометрическое совершенствование корпуса подводной лодки — наиболее рационален, однако уже на ПЛ второго поколения он был практически исчерпан, поскольку:
— корпуса ПЯ стали выполнять осесимметричной формы, с геометрическими характеристиками, близкими к оптимальным по ходкости;
— были уменьшены дополнительные виды сопротивления (выступающие части, вырезы);
— стали применять одновальные ЭУ;
— ПЛ получили хорошо отработанный движительно-рулевой комплекс с геометрическими характеристиками, близкими к оптимальным по пропульсивным качествам.
По указанным причинам возможность дальнейшего увеличения Кгидр традиционными способами крайне невелика.
Начиная с конца 1950-х годов, в течение ряда лет в мире были предприняты исследования по увеличению Кгидр. путем искусственного снижения сопротивления ПЛ.
Наибольшее развитие получили исследования в трех направлениях:
1) отсос пограничного слоя с поверхности корпуса ПЛ с целью его ламинаризации (наружная обшивка при этом должна иметь щели или отверстия весьма малых размеров). Как известно, коэффициент сопротивления тела при ламинарном обтекании в 10... 15 раз меньше, чем при турбулентном;
2) применение искусственной кавитации — создание вокруг корпуса ПЛ или его части искусственной каверны. При этом трение корпуса о воду в части, охватываемой каверной, заменяется трением о газ, плотность которого в сотни раз меньше. Газообразующие вещества и газогенераторы для создания такой каверны должны приниматься на ПЛ и включаться в нагрузку. Этот способ относится к числу форсажных, увеличивающих скорость хода на время, определяемое запасами газообразующих веществ;
3) подача раствора полимера на наружную поверхность корпуса для снижения сопротивления трения. Этот способ также относится к форсажным. Запасы полимера и установки для его приготовления должны находиться на ПЛ [56].
После многочисленных теоретических и экспериментальных работ выяснилось, что первые два направления не являются перспективными для подводных лодок.
Исследования по третьему направлению продолжаются. Пред-положительно, применение этого способа снижения сопротивления ценой небольшого увеличения водоизмещения ПЛ может дать при-рост скорости на 5... 10% на несколько часов хода. Важным обстоятельством является и то, что подача полимера на обтекатель антенны ГАС снижает уровень гидродинамической помехи.
Таким образом, в настоящее время и в ближайшем будущем увеличение скорости хода может быть достигнуто преимущественно традиционным путем — увеличением мощности ЭУ. Так как зависимость (ʋ - N⅓), то прирост скорости будет происходить весьма медленно. Для существенного прироста скорости хода необходимо создание принципиально новых ЭУ, имеющих высокие мощности при приемлемых массогабаритных показателях.
Дата добавления: 2022-01-31; просмотров: 1382;