Штурманское вооружение подлодок
Штурманское вооружение подводных лодок (ПЛ) предназначено для обеспечения кораблевождения, навигационной безопасности плавания и выдачи навигационных параметров в системы управления и радиоэлектронного вооружения.
Основные факторы, определяющие назначение и состав штурманского вооружения, устанавливаемого на кораблях, в том числе и на ПЛ:
— назначение и тактико-технические характеристики корабля;
— перечень навигационных параметров и требования к их погрешностям со стороны радиоэлектронного вооружения (РЭВ) и систем оружия, размещаемого на корабле.
Как правило, в последние десятилетия все навигационные приборы и системы, устанавливаемые на кораблях, интегрированы в автономные навигационные комплексы (рис. 5.38 [128] — см. вклейку).
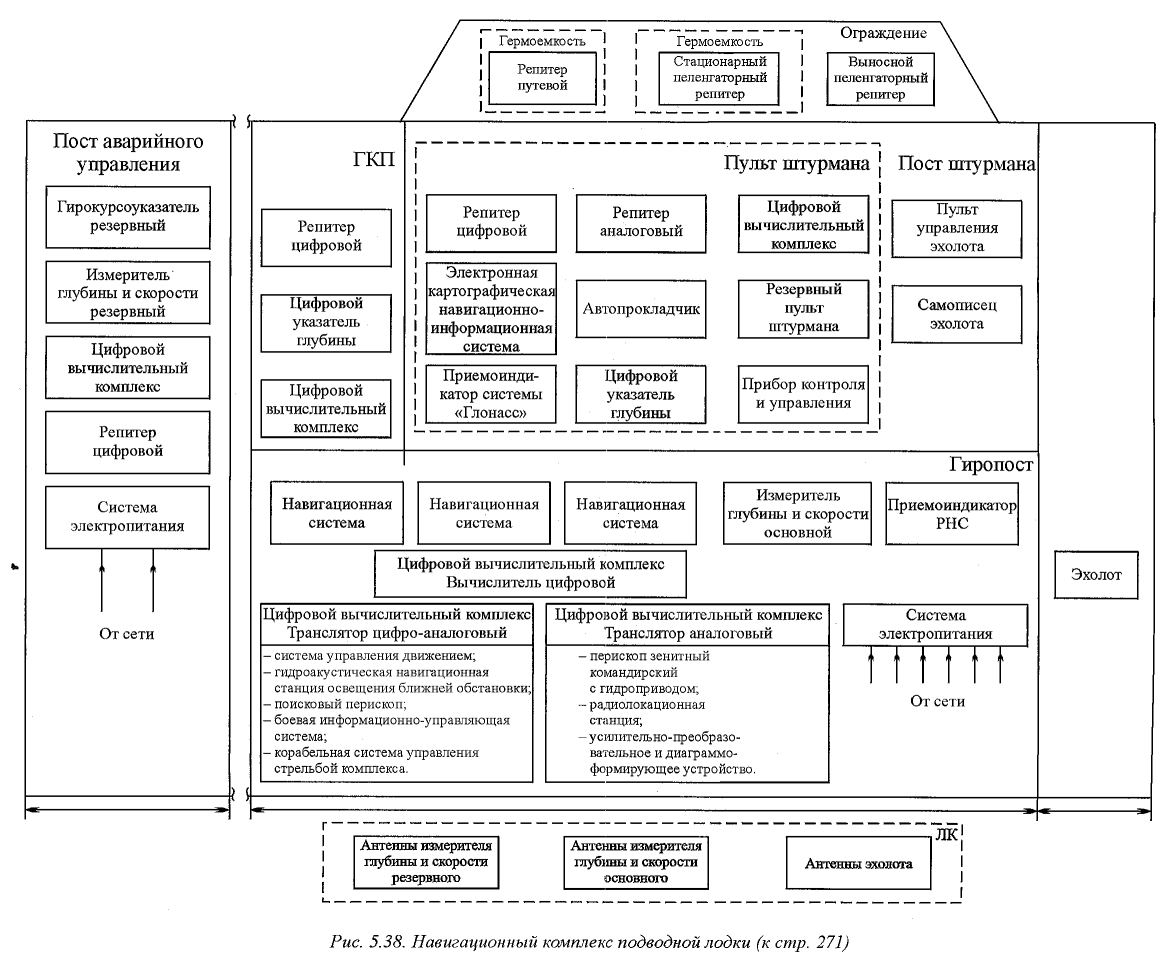
Структурно в состав навигационных комплексов входят системы, автономно и непрерывно вырабатывающие навигационные и динамические параметры: курс, скорость, координаты места, углы качки, глубину под килем. В качестве таковых могут использоваться:
для определения курса: магнитные и гироскопические компасы (гирокомпасы); гироазимуты; инерциальные навигационные системы, самые совершенные системы навигации, способные автономно вырабатывать курс, скорость, углы качки и координаты местоположения корабля.
для определения скорости: гидродинамические, электромагнитные и гидроакустические лаги. Гидродинамические и электромагнитные лаги определяют относительную скорость корабля — скорость относительно воды, без учета вектора течения.
Индукционный принцип измерения скорости основан на использовании закона электромагнитной индукции, по которому в проводнике, перемещаемом в магнитном поле, возникает ЭДС, пропорциональная скорости перемещения проводника. При этом величина ЭДС не зависит от того, движется проводник относительно магнитного поля или магнитное поле относительно проводника. Магнитное поле создается электромагнитом переменного тока, а морская вода выполняет роль проводника.
Гидроакустические лаги определяют абсолютную скорость — скорость корабля относительно дна и составляющие этой скорости: продольную и поперечную Гидроакустический принцип измерения абсолютной скорости основан на использовании эффекта Допплера. Физический смысл этого эффекта заключается в том, что при движении приемника звуковых колебаний относительно излучателя, приемник воспринимает колебания с частотой, отличной от частоты излучателя. Измеряемая разность частот пропорциональна скорости корабля.
для измерения глубины под килем ПЛ (в отличие от глубины погружения корабля), используются эхолоты — гидроакустические системы, определяющие расстояние до дна путем измерения времени между излучением сигнала и приемом этого сигнала, отраженного от дна.
Местоположение корабля (координаты его нахождения) непрерывно и автономно может определяться двумя методами:
1) методом счисления, с использованием информации от систем курсоуказания и определения скорости,
2) методом инерциального счисления, с использованием возможности инерциальной навигационной системы независимо от других источников информации вырабатывать вектора составляющих перемещения корабля в географической системе координат.
Характерная особенность систем непрерывного действия — накопление со временем погрешности измеряемых ими величин. С целью снижения накопленных погрешностей и их обнуления используются эпизодические средства внешней коррекции:
— пеленгаторные репитеры, с помощью которых можно определить пеленг береговых ориентиров и небесных светил;
— астрономические (радио) секстаны, с использованием которых можно определить пеленг небесных светил не только в видимом спектре, но и в радиодиапазоне, т.е. откорректировать счисляемое место.
К неавтономным эпизодическим средствам коррекции координат корабля относятся космические радионавигационные системы. Космические спутниковые радионавигационные системы — самые высокоточные средства определения места корабля.
Для обеспечения плавания аварийного корабля, на котором штатные средства навигации выведены из строя, предусматривается установка автономных резервных навигационных систем курсоуказания, измерения скорости и глубины под килем. Для этих же целей предусматривается использование тахометров и суммарных счетчиков оборотов гребного винта. Приборы отображения навигационных параметров, а также средства управления и контроля технического состояния навигационного комплекса объединены в автоматизированное рабочее место штурмана (рис. 5.39), которое находится в помещении главного командного поста ПЛ.
Навигационные гидроакустические антенны и приемные устройства измерителей скорости размещаются за бортом в килевой части корпуса ПЛ.
Структура современного навигационного комплекса основана на функционально-модульном принципе ее построения и обеспечивает возможность различных вариантов наращивания или сокращения набора навигационных средств.
Дата добавления: 2022-01-31; просмотров: 844;