Корабельные устройства подводных лодок
В зависимости от решаемых задач, корабельные устройства можно разделить на общекорабельные и специальные. Общекорабельные устройства участвуют в обеспечении эксплуатации подводной лодки как корабля в целом, а специальные обеспечивают выполнение операций, связанных с работой отдельных систем корабля. Типичные представители общекорабельных устройств:
— рулевые устройства;
— якорное, буксирное и швартовное устройства;
— устройство для работы дизеля под водой;
— подъемно-мачтовые устройства средств связи и наблюдения, включая антенно-фидерные устройства (АФУ).
К специальным устройствам можно отнести:
— леерное и страхующее устройства;
— грузовые устройства различного назначения;
— щиты с приводами, обеспечивающие закрытие вырезов, необходимых для работы систем и механизмов;
— аварийно-спасательные устройства.
Проектирование общекорабельных устройств ведется одновременно с общим проектированием корабля и может оказать существенное влияние на архитектуру ПЛ, т.к. необходимо предусматривать места для размещения их составных частей. Специальные устройства проектируются, как правило, для установки в строго определенном месте, с учетом уже имеющегося решения по основным корпусным конструкциям.
Рулевые устройства. Рулевые устройства (РУ) предназначены для управления движением подводной лодки на всех скоростях хода и при любом состоянии моря, как в надводном, так и в подводном положении. Следует отметить, что в связи с пространственным характером маневрирования подводная лодка несет значительно большее число рулевых устройств, чем надводные корабли.
Любое рулевое устройство состоит из трех основных элементов: руля, рулевого привода (машины) и системы управления. Руль непосредственно воздействует на ПЛ, изменяя направление ее движения. Рулевой привод обеспечивает перекладку руля, а система управления воздействует на привод для перекладки руля в необходимое для совершения маневра положение. При управлении движением ПЛ рулевые устройства и рулевые машины используются для двух режимов: маневрирования и стабилизации по курсу и глубине.
Рулевые устройства ПЛ можно классифицировать по следующим признакам:
— по количеству перьев рулей (с одним и с двумя перьями)
— по связи между перьями одного наименования (с общим балле ром и с разрезным балле ром);
— по расположению перьев рулей (консольные и с концевыми опорами);
— по способу закрепления в корпусе ПЛ (стационарно закрепленные и отваливающиеся).
По назначению рули подразделяются следующим образом:
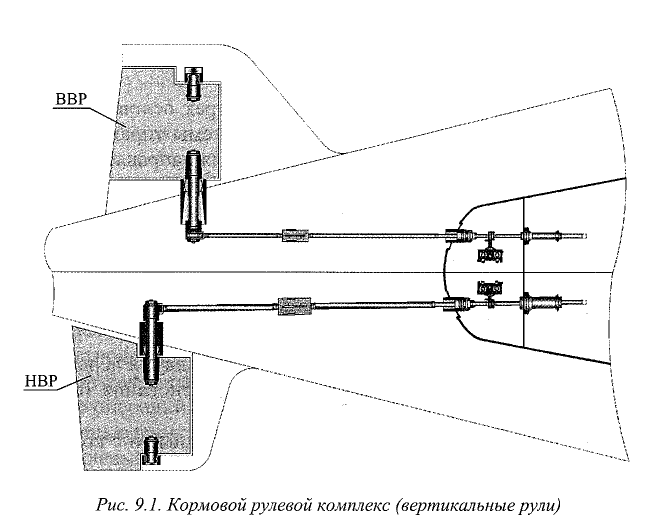
— вертикальные (верхний и нижний) рули (ВР), предназначенные для изменения курса ПЛ (рис. 9.1);
— горизонтальные рули (ГР), предназначенные для маневрирования по глубине.
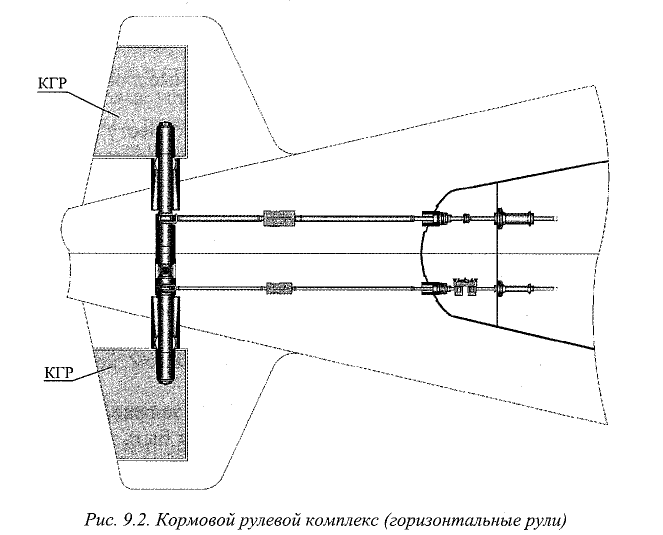
Горизонтальные рули классифицируются по месту установки: носовые горизонтальные рули (НГР); средние горизонтальные рули (СГР); рубочные горизонтальные рули (РГР); кормовые горизонтальные рули (КГР) (рис. 9.2).
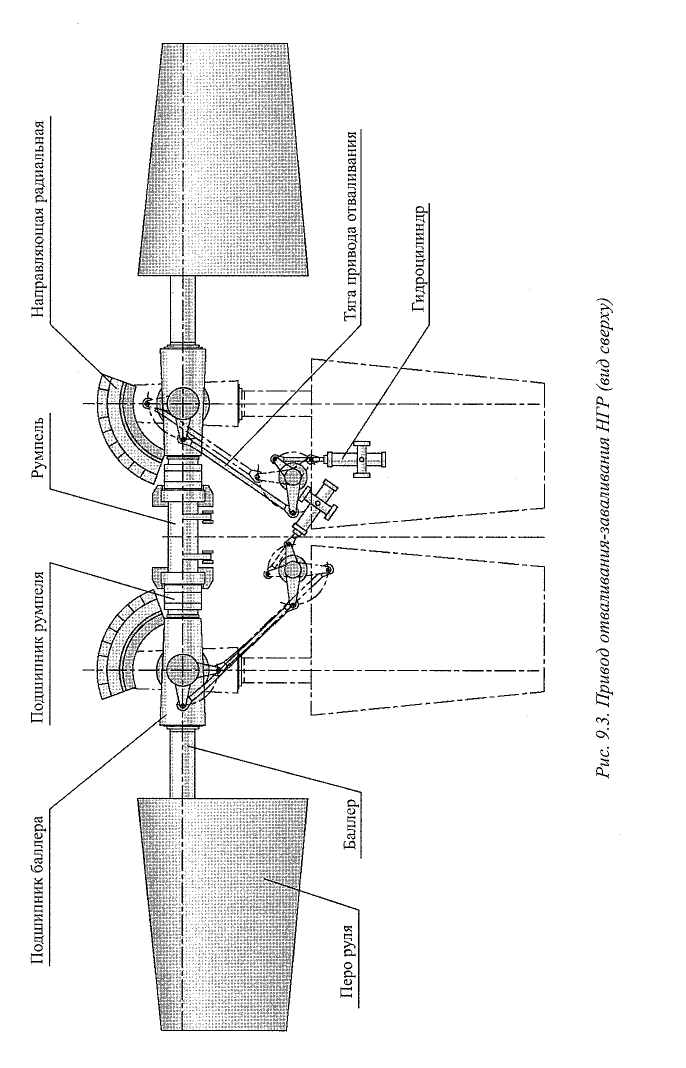
Носовые горизонтальные рули располагаются в носовой части надстройки ПЛ как можно дальше от миделя при соблюдении требований о минимальной помехе работе гидроакустической станции. НГР более эффективны, чем РГР, но одновременно и более сложны из-за количества приводов (перекладки, отваливания-заваливания рулей, щитов, прикрывающих вырезы в наружном корпусе под рули) (рис. 9.3).
В случае невозможности размещения НГР в носовой части надстройки по условиям влияния на ГАС, они могут быть приближены к ограждению выдвижных устройств, и тогда они называются СГР.
Рубочные горизонтальные рули располагаются в ограждении выдвижных устройств, которое должно быть возможно ближе к но совой оконечности ПЛ для увеличения их эффективности, и отличаются тем, что имеют неразрезной баллер.
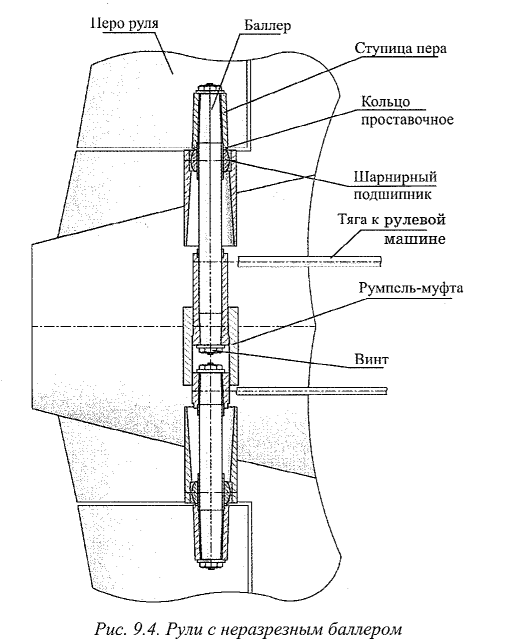
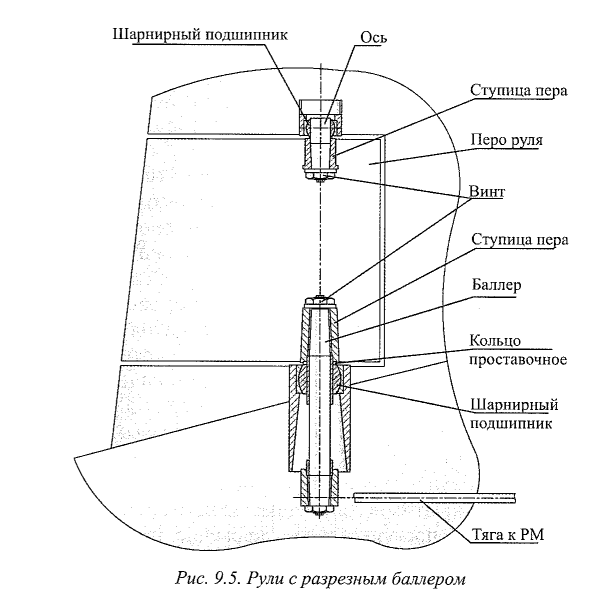
На современных подводных лодках применяются схемы рулевых устройств с неразрезными (рис. 9.4) и с разрезными баллерами (рис. 9.5).
Носовые и средние горизонтальные рули имеют одинаковую конструкцию и состоят из двух опор-подшипников с установленными в них баллерами с перьями рулей. Концы баллеров объединены общим румпелем, соединенным тягой с приводом перекладки. Отваливание и заваливание НГР происходит под действием привода отваливания, при движении которого концы баллеров заходят в зацепление с румпелем. При заваливании рулей концы баллеров, вышедшие из зацепления, перемещаются по радиальным направляющим, удерживая заваленные в легком корпусе ПЛ перья в горизонтальном положении. В крайних положениях РУ стопорятся закладными частями с помощью приводов. Ниши в легком корпусе, в которые убираются рули, закрываются щитами.
Расположение кормовых горизонтальных и вертикальных рулей обусловлено формой кормовой оконечности, а также числом и размещением гребных валов и общей компоновкой кормовой оконечности.
На подводных лодках с высокими скоростями полного подводного хода (более 20...25 узлов) при конструкции кормовых горизонтальных рулей с общим баллером и приводом обычно размещают большие и малые кормовые горизонтальные рули. В этом случае малые кормовые горизонтальные рули используются при управлении на высоких скоростях. Это необходимо для обеспечения ручного управления движением, снижения частоты перекладки рулей в режиме автоматической стабилизации глубины погружения, а также для уменьшения вероятности аварийных последствий при заклинивании кормовых рулей на большой скорости.
На ПЛ применяют, как правило, рули балансирного типа или выполненные в виде закрылков стабилизирующих поверхностей. Форма профиля, площадь, относительное удлинение, коэффициент компенсации определяются на основании гидродинамических расчетов и испытаний.
Рулевые приводы (машины) применяют двух типов:
1) гидравлические с питанием от общесудовой системы гидравлики или от специальной насосно-аккумуляторной установки;
2) электрогидравлические с насосами переменной производительности в качестве источника питания.
Электрогидравлические приводы имеют ряд преимуществ перед гидравлическими. Во-первых, отпадает необходимость в гидравлических трубопроводах, соединяющих пост управления, расположенный в ГКП, с местом установки силовых цилиндров. Во-вторых, обеспечивается более точная перекладка руля и возможность совместной работы рулевого устройства с авторулевым.
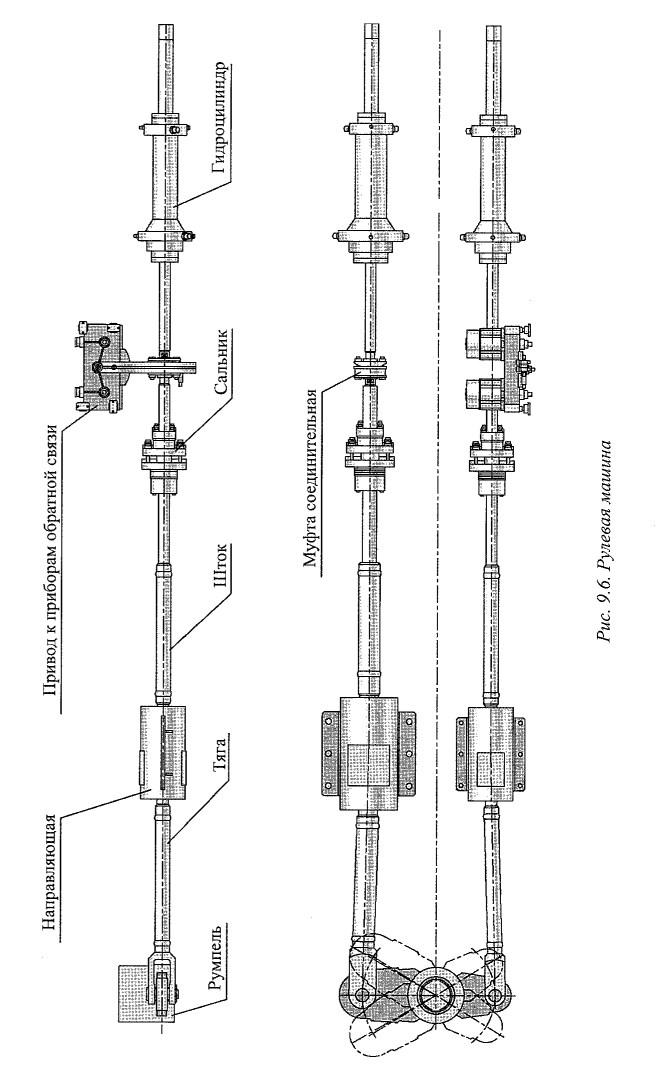
Типовые рулевые машины (РМ) состоят из одного или двух гидроцилиндров, соединительных муфт, привода к приборам обратной связи, сальников, штоков, тяг, направляющих, румпелей, преобразующих возвратно-поступательное движение штоков гидроцилиндров во вращательное движение баллеров с перьями, и гидро-оборудования, обеспечивающего различные режимы работы РМ (рис. 9.6).
РМ должны иметь механические и электрические указатели положения рулей, а также приводы к приборам обратной связи, выдающие в систему управления движением электросигналы о положении рулей. Кроме того, РМ должны располагать основной рулевой системой гидравлики и резервной, при этом переключение питания РМ с одной установки на другую должно происходить автоматически или дистанционно вручную за время, исключающее возникновение аварийной ситуации.
Кормовой рулевой комплекс должен иметь местный резервный пост управления вертикальными и кормовыми горизонтальными рулями, который обеспечивает возможность перекладки рулей при выходе из строя основного поста управления, расположенного в центральном посту.
Проектирование рулевых устройств подводного корабля производится на основании гидродинамических расчетов и теоретического чертежа ПЛ, выполненных специалистами-гидродинамиками. Для обеспечения надежности работы рулевых комплексов, определения размеров элементов РМ и РУ, необходимо выполнить расчет мощности РМ, а также расчет статической и усталостной прочности элементов РУ и РМ, нагруженных знакопеременными нагрузками.
Исходные данные для расчетов любых рулей включают:
— графики гидродинамических сил и моментов, действующих на перья рулей при перекладке, при отваливании-заваливании ИГР;
— данные по максимальной и экономической скорости хода ПЛ;
— конструкцию перьев рулей;
— среднюю скорость перекладки рулей, определяемую в зависимости от водоизмещения ПЛ, способа управления, системы рулевой гидравлики, и составляющую от 2% до 9%;
— максимальные рабочие углы перекладки; рулевые машины и рулевые устройства должны обеспечивать возможность перекладки перьев рулей на рабочие углы: вертикальные рули — ±(30...40°); горизонтальные рули — ±(25...30°).
— время отваливания-заваливания ИГР;
— прочностные характеристики применяемых материалов.
В процессе проектирования выбирают и подтверждают расчетами основные размеры элементов РУ и РМ:
— диаметры баллеров и опор рулей;
— радиусы румпелей;
— диаметры штоков и поршней гидроцилиндров;
— запасы статической и усталостной прочности элементов РУ и рулевого привода;
— расходы гидравлики, необходимые для работы РМ.
Все расчеты производят по формулам теоретической механики и сопротивления материалов. Для дальнейшего выбора гидрооборудования и рулевой системы гидравлики по результатам расчетов и выбранной мощности РМ строят графики зависимости моментов, действующих на руль от угла перекладки при максимальной и экономической скорости хода.
Дата добавления: 2022-01-31; просмотров: 1239;