Управляемость подводной лодки
Управляемостью называется способность подводной лодки сохранять движение по заданной траектории под воздействием органов управления. Управляемость представляет собой сочетание двух противоположных свойств: устойчивости и маневренности. Устойчивостью называется способность ПЛ сохранять направление своего движения, а маневренностью — возможность изменять это на-правление под воздействием рулей или какого-либо другого органа управления. Нахождение разумного сочетания этих свойств при проектировании необходимо для обеспечения таких параметров движения подводной лодки, как радиус циркуляции, углы крена и дифферента, изменение глубины при маневрировании в различных режимах плавания [109].
Особенно это касается глубины погружения, углов крена и дифферента, так как максимальные значения этих параметров определяются требованиями безопасности плавания ПЛ в погруженном положении. Изменение глубины при маневрах подводной лодки ограничивается предельной глубиной погружения, а при углах крена, больших ,45°, и углах дифферента, больших 30°, может быть нарушена нормальная работа механизмов, систем и устройств.
Большое значение для характеристики динамических качеств ПЛ имеет оценка устойчивости ее движения. Очевидно, что увеличение степени устойчивости при неизменной эффективности органов управления ухудшает маневренные качества ПЛ, и наоборот, уменьшение степени устойчивости улучшает маневренность.
Необходимо отметить, что форма корпуса современной подводной лодки в большинстве случаев не удовлетворяет условиям необходимой устойчивости движения. В связи с этим рациональные гидродинамические качества подводной лодки обеспечиваются посредством установки кормового оперения и выбора соответствующих размеров рулей и стабилизаторов.
Анализ параметров управляемости ПЛ обычно производится на основании упрощений общих уравнений движения. Разделяя движение по плоскостям, рассматривают основные характеристики управляемости и устойчивости ПЛ в горизонтальной и вертикальной плоскостях.
Основным показателем маневренных качеств подводной лодки в горизонтальной плоскости как в надводном, так и в подводном положениях служит минимальный диаметр установившейся циркуляции, обычно измеряемый в длинах корпуса ПЛ.
Под циркуляцией понимают движение центра тяжести ПЛ по криволинейной траектории при перекладке вертикального руля (рис. 3.7).
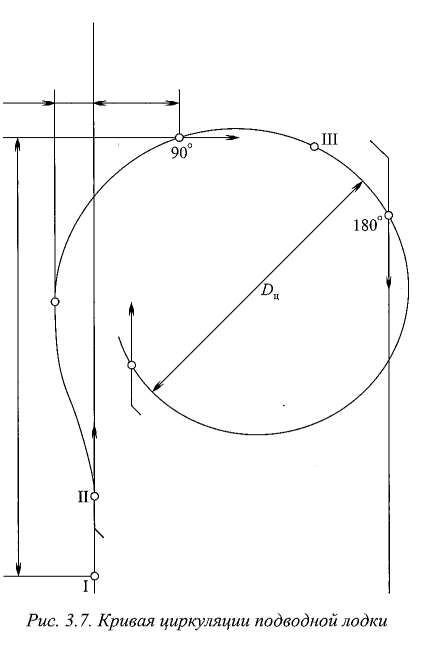
Циркуляцию можно разбить на три периода:
1) маневренный период, в течение которого производится перекладка вертикального руля;
2) эволюционный период или период неустановившегося движения, когда кинематические параметры изменяются с течением времени;
3) период установившейся циркуляции — характеризуется постоянными во времени значениями параметров.
Ввиду несимметричности формы корпуса ПЛ относительно горизонтальной плоскости при циркуляции в подводном положении появляются вертикальные силы, вызывающие дифферентовку лодки на корму (как правило) и перемещения ее по глубине.
Кроме того, в процессе маневра происходит изменение скорости хода и угла крена. Падение скорости на циркуляции обусловлено увеличением сопротивления движению вследствие появления углов дрейфа, атаки, угловой скорости. Величина падения скорости зависит от интенсивности маневра и может достигать 20...30% от исходной.
Крены на циркуляции изменяются во времени и приобретают постоянное значение на установившемся участке. Картина сил и моментов, определяющих появление кренов на циркуляции, имеет принципиальные различия для надводного и подводного положений.
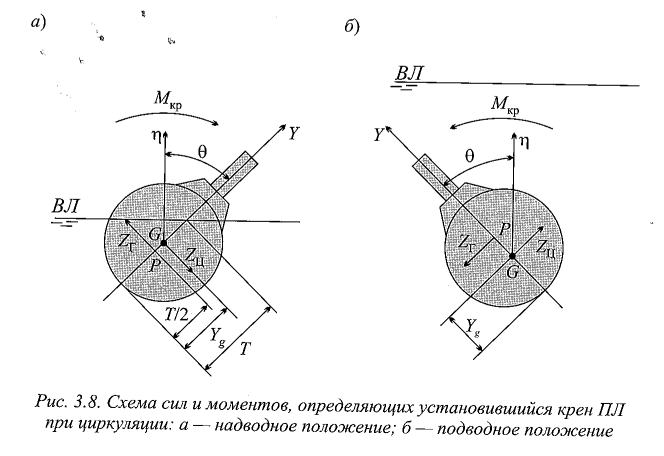
При циркуляции на ПЛ действует боковая гидродинамическая сила (Zr), зависящая от угла дрейфа, угловой скорости и угла перекладки рулей, и приложенная на некотором расстоянии от центра тяжести. На установившейся циркуляции гидродинамическая сила равна по величине и противоположна проекции на нее центробежной силы инерции (Zц). Эти две силы образуют пару сил — гидродинамический кренящий момент (М). Направление крена определяется точкой приложения гидродинамической силы.
В надводном положении гидродинамическая сила приложена по высоте примерно на половине осадки (T). Поэтому на установившейся циркуляции ПЛ кренится обычно во внешнюю сторону циркуляции.
В подводном положении из-за наличия ограждений выдвижных устройств гидродинамическая сила приложена, как правило, выше центра тяжести, поэтому на установившейся циркуляции ПЛ кренится внутрь циркуляции (рис. 3.8) [47].
Статический крен не полностью отражает поведение ПЛ на циркуляции. Важное значение имеет динамический крен, появление которого объясняется инерцией корабля и малым сопротивлением вращению вокруг продольной оси. Гидродинамический кренящий момент пропорционален квадрату скорости хода. Поэтому в начале циркуляции, когда скорость снижается незначительно, динамический крен может в 1,5...2 раза превышать статический.
Величина диаметра установившейся циркуляции определяется гидродинамическими характеристиками ПЛ и углом перекладки вертикального руля. При движении в подводном положении, на глубине, исключающей влияние поверхности, параметры установившейся циркуляции не зависят от скорости хода. При движении в надводном положении скорость хода (а точнее, число Фруда) оказывает влияние на диаметр циркуляции, что связано, прежде всего, с волнообразованием на поверхности моря.
Вертикальные рули должны обеспечивать заданный диаметр установившейся циркуляции при максимальном угле их перекладки в подводном и надводном положениях. Для примера: в подводном положении величина относительного диаметра установившейся циркуляции ПЛ проекта 636 составляет около 4 длин корпуса, в надводном — около 5.
Маневренные качества подводной лодки в вертикальной плоскости принято оценивать скороподъемностью. Скороподъемностью ПЛ называется скорость вертикального изменения глубины, вызванная перекладкой кормовых или носовых (средних, рубочных) рулей на 1°. Величина скороподъемности ПЛ является одним из показателей эффективности горизонтальных рулей и рассчитывается отдельно для каждой пары рулей.
Дата добавления: 2022-01-31; просмотров: 866;