Ходкость подводных лодок
Ходкостью корабля называется его способность перемещаться в воде с заданной скоростью при эффективном использовании мощности силовой установки [19].
Движущаяся подводная лодка приводит в движение массы окружающей воды и испытывает при этом действие гидродинамических сил на поверхность корпуса. Эти силы можно привести к главному вектору гидродинамических сил. Проекция главного вектора на направление движения называется сопротивлением воды движению ПЛ. При решении задач ходкости обычно ограничиваются рассмотрением поступательного движения ПЛ с постоянной скоростью в направлении, совпадающем с диаметральной плоскостью.
Такому перемещению ПЛ препятствует сила сопротивления среды R(ʋ), направленная в сторону, противоположную движению. Движение ПЛ с заданной скоростью возможно лишь при условии, что к ней будет приложена некоторая движущая сила, направленная в сторону ее движения и равная силе сопротивления. Полезная тяга (Te) создается движителями, которые преобразуют механическую энергию энергетической установки в энергию поступательного движения (рис. 3.4).
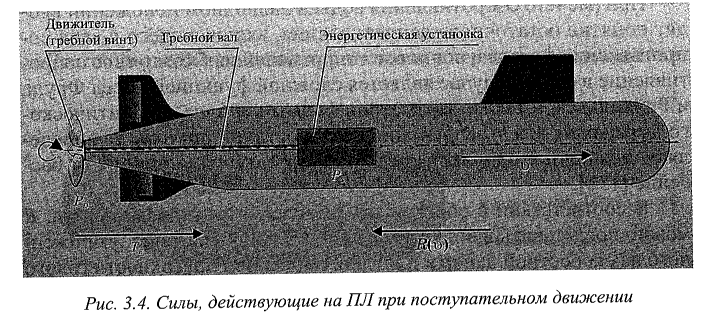
Таким образом, ходкость ПЛ состоит из двух относительно самостоятельных составляющих — сопротивления воды движению ПЛ и движителей, обеспечивающих поступательное движение.
В общем случае сопротивление R зависит от главных размерений, коэффициентов полноты, формы обводов, состояния поверхности корпуса, скорости и условий движения подводной лодки. Сопротивление воды рассматривается отдельно для подводного, надводного, а также для перископного положений ПЛ в связи с особенностями формирования гидродинамических сил в каждом из указанных режимов движения.
Полное сопротивление принято разлагать на составляющие, в связи с различной природой их появления, при допущении о независимости действия сил различной природы (на сопротивление давления Rд и сопротивление трения Rт) [130].
Основные источники сопротивления давления:
— волнообразование при движении на поверхности или вблизи ее — волновое сопротивление R в;
— наличие вязкого пограничного слоя — сопротивление формы Rф.
Сопротивление трения возникает вследствие влияния вязкости воды, обуславливающей прилипание ее частиц к поверхности ПЛ.
Сопротивление трения представляют в виде суммы сопротивления трения так называемой эквивалентной пластины Rэп, то есть гидродинамически гладкой пластины, расположенной вдоль потока, с площадью, равной площади смоченной поверхности корпуса ПЛ, и дополнительного сопротивления трения, вызванного кривизной поверхности корпуса, Rкр [109].
При расчете сопротивления воды в надводном положении вводят понятие остаточного сопротивления, включающего в себя сопротивление формы и волновое сопротивление. Остаточное сопротивление в общем случае является сложной функцией чисел Фруда и Рейнольдса, а также параметров формы корпуса. Аналитического выражения для этой функции не существует, поэтому ее определяют исключительно экспериментальным путем, в опытовом бассейне [136].
В соответствии с общими представлениями гидромеханики, R можно представить в виде коэффициента сопротивления, умноженного на скоростной напор и площадь смоченной поверхности голого корпуса:

Рассмотрим составляющие полного сопротивления для различных положений ПЛ — подводного, перископного и надводного (рис. 3.5).
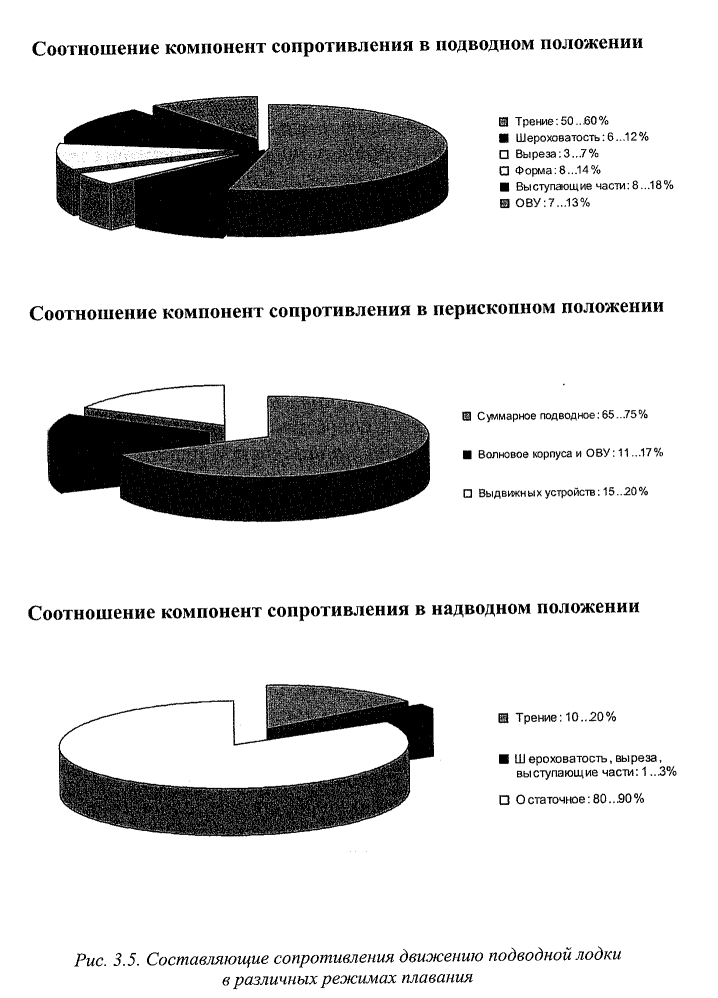
Для подводного положения полное сопротивление принято представлять в виде суммы:
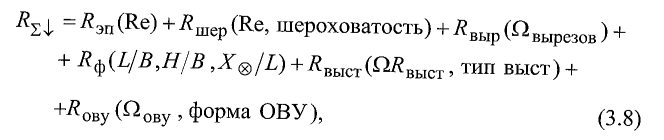
где Rэп — сопротивление трения эквивалентной пластины; Rшер — сопротивление шероховатости; Rвыр — сопротивление вырезов и отверстий; Rф — сопротивление формы; Rвыст — сопротивление выступающих частей; Rовy — сопротивление ограждения выдвижных устройств.
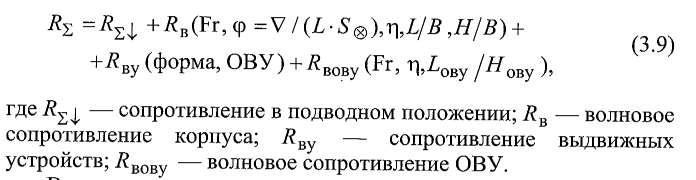
При движении вблизи свободной поверхности (в перископном положении) появляются дополнительные (по отношению к подводному положению) составляющие, связанные с наличием волнового сопротивления (корпуса и ОВУ), а также сопротивления выдвижных устройств.
Сопротивление в перископном положении можно представить в виде:
В надводном положении сопротивление воды принято разделять на сопротивление трения эквивалентной пластины, надбавку на шероховатость, сопротивление вырезов, сопротивление выступающих частей — эти компоненты рассчитываются аналогично подводному положению — и на остаточное сопротивление, включающее в себя сопротивление формы и волновое сопротивление.
Сопротивление в надводном положении можно представить в виде:
Подавляющую долю остаточного сопротивления составляет волновое, поэтому приближенно полагают остаточное сопротивление функцией числа Fr. Остаточное сопротивление принимают по данным близкого прототипа, либо определяют буксировкой моделей. Практические расчеты сопротивления воды обычно ведут в табличной форме, а результаты представляют в виде графиков R(v).
Чтобы обеспечить установившееся движение ПЛ в некотором диапазоне скоростей, движитель должен удовлетворять следующим требованиям:
— соответствовать параметрам двигателя;
— соответствовать проекту и эксплуатационным характеристикам ПЛ;
— обладать высоким КПД.
На подводных лодках используются так называемые гидрореактивные движители, т.е. движители, создающие движущую силу за счет реакции отбрасываемых в сторону, противоположную движению, масс жидкости, захватываемых из окружающей среды. К числу реактивных движителей относятся гребные винты, водометные движители и другие.
Наиболее распространенный движитель подводных лодок — гребной винт. Он обладает высоким КПД, конструктивной простотой и хорошей эксплуатационной надежностью. Лопасти гребного винта представляют собой закрученные крылья малого удлинения. Их число обычно лежит в пределах 3-9 [130].
В настоящее время на подводных лодках чаще всего встречается одновальная схема, которая благоприятно сказывается на акустических характеристиках ПЛ. Двух- и трехвальные установки применяются значительно реже.
Как правило, на каждом гребном валу размещен один гребной винт. Иногда для повышения КПД движительного комплекса применяют соосные гребные винты, вращающиеся в противоположные стороны. Такая конструкция не нашла применения из-за сложности исполнения и эксплуатации. Еще реже можно встретить конструкции винта типа «тандем», состоящей из двух винтов, вращающихся в одну сторону.
Для повышения эффективности гребных винтов применяются также различные направляющие насадки.
Движители, состоящие из водопроточных труб или каналов, внутри которых располагается насос того или иного типа, принято называть водометными. Насос засасывает воду через приемное отверстие и выбрасывает ее через напорный водовод. КПД водометного движителя меньше, чем у гребного винта. Водомет способен конкурировать с винтом только при скоростях более 50...60 узлов. Это объясняет столь редкое применение водометного движителя в качестве главного движителя. Однако выбор типа движителя при проектировании основан не только на обеспечении максимальных пропульсивных характеристик. Существует целый ряд других, не менее важных, требований, таких как защищенность движителя и минимальная шумность.
Винт и корпус подводной лодки находятся в сложном гидродинамическом взаимодействии. На винт, работающий за корпусом, набегает поток воды, возмущенный движением корпуса, в результате чего гидродинамические характеристики винта изменяются по сравнению с их значениями в свободной воде. Работающий винт изменяет величины давлений на поверхности кормовой оконечности корпуса, вследствие чего изменяется сопротивление воды движению корабля [41].
Совершенство гидродинамического комплекса «винт - корпус» оценивается пропульсивным коэффициентом (ŋ), который представляет собой отношение буксировочной мощности корабля к суммарной валовой мощности, затрачиваемой на вращение винтов:
Необходимо сказать несколько слов о резервных движительных комплексах, предназначенных для обеспечения резервного движения подводной лодки и маневрирования на малых скоростях в надводном и подводном положениях.
Резервные средства движения не обеспечивают высоких скоростей хода. Рабочий диапазон их скоростей лежит в пределах 2...4 узлов и обеспечивается одним или двумя резервными движительными комплексами.
Резервные движительные комплексы могут быть следующего исполнения (рис. 3.6):
— РДК в водопроточном канале (винт в трубе);
— откидная колонка (винт в насадке);
— РДК в гондоле на стабилизаторе.
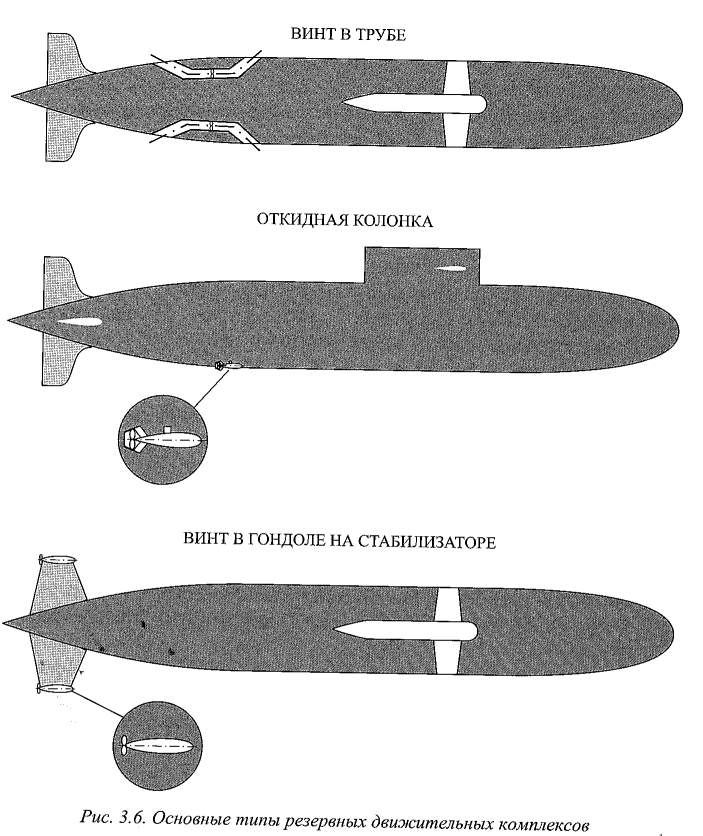
Винт в трубе, превосходя прочие конструкции по защищенности движителя от внешнего воздействия, имеет серьезные недостатки — высокое гидравлическое сопротивление, и вследствие него низкий общий КПД движителя.
Винт в насадке имеет высокий КПД при незначительных габаритах. Установка его в корпусе ПЛ не требует таких объемов, как винт в трубе. К недостаткам этого РДК следует отнести сложность устройств отваливания.
РДК в гондоле размещается вне корпуса на горизонтальных стабилизаторах и представляет собой гондолу с электродвигателем и гребным винтом, с насадкой или без нее. Вынесенный из легкого корпуса РДК освобождает пространство для других систем и устройств. Однако не убирающиеся в корпус неработающие резервные движители создают дополнительное сопротивление и уменьшают скорость корабля.
Таким образом, ходовые качества ПЛ определяются взаимодействием корпуса, движителя и энергетической установки. Каждый из этих элементов выполняет определенные функции в обеспечении движения ПЛ с заданной скоростью.
Дата добавления: 2022-01-31; просмотров: 364;